
TFG destacados
Autor: Ismael Fernández Zambrano (Grado en Tecnologías Informáticas)
Tutores: Manuel Jesús Domínguez Morales y Lourdes Miró Amarante.
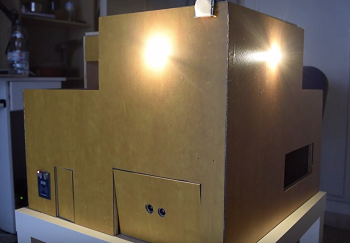
Resumen: En la presente memoria se presenta un proyecto basado en el control y automatización de una vivienda a través de microcontroladores de bajo coste. Con la idea de plasmar el sistema implementado, se ha construido una maqueta que simulará una vivienda.
El proyecto actual se puede dividir en dos aspectos claramente diferenciados: por un lado se realizó el control de diferentes dispositivos ubicados en la vivienda, y por otro, la implementación de una interfaz de usuario usada para interactuar con estos dispositivos.

Autor: Abraham Requena Mesa (Grado en Tecnologías Informáticas.)
Tutores: Manuel Jesús Domínguez Morales y Manuel Rivas Pérez.
Resumen: La realización de este proyecto busca ofrecer una forma cómoda, rápida y sencilla de tener un control constante y absoluto de tu sistema de riego, permitiendo realizar todas las acciones a distancia a través del móvil u ordenador.
Para ello, haremos uso de un sistema empotrado como es la Raspberry Pi B+ acompañada de un sensor de humedad y una serie de librerías Python, elementos que nos ayudarán a conocer el estado de nuestras tierras y nos permitirán tomar decisiones.

Autores: Jose Ignacio Naranjo Carcía y José María Carrido Carcía (Grado en Ingeniería de Computadores)
Tutores: Ángel Francisco Jiménez Fernández y Manuel Jesús Domínguez Morales
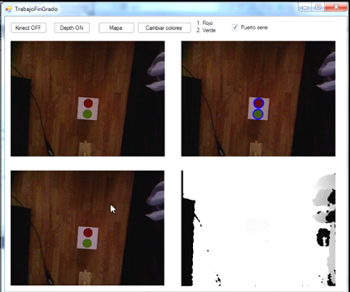
Resumen: A rasgos generales, el proyecto de Air Hockey se sostiene sobre varios pilares fundamentales:
1. El tratamiento de imágenes. En primer lugar se filtra un color en concreto de la imagen captada por la cámara. En segundo lugar se localizan objetos circulares, lo cual es nuestro propósito.
Autor: Sebastián García García (Grado en Tecnologías Informáticas)
Tutores: Manuel J. Domínguez Morales & Francisco de Asís Gómez Rodríguez
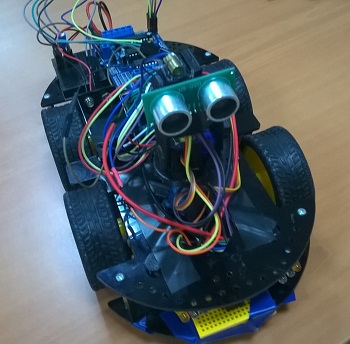
Consiste en un robot móvil capaz de evitar obstáculos, previa detección de los mismos mediante un sistema de visión auxiliar que captura vídeo mediante una cámara Microsoft Kinect colocada de manera cenital. Esta misma es capaz tanto de detectar el robot móvil como, a su vez, los mismos obstáculos, enviando la información de manera inalámbrica a una placa Arduino que es la artífice del movimiento del mismo.

Autor: Juan Manuel Montes Sánchez (Ingeniero Técnico Industrial en Electrónica Industrial)
Tutor: Francisco de Asís Gómez Rodríguez
El proyecto consistió en el diseño y fabricación un prototipo basado en el sistema Raspberry Pi, incluyendo software, placas auxiliares, instalación y puesta en marcha del mismo, así como el estudio de las posibles aplicaciones y mejoras posteriores de cara a su uso comercial, de una regleta eléctrica controlable desde internet.
Tutor: José Luis Guisado Lizar (Departamento: Arquitectura y Tecnología de Computadores)
Co-tutor: Fernando Díaz del Rio (Departamento: Arquitectura y Tecnología de Computadores)
Se ha conseguido minimizar el tiempo de ejecución del algoritmo mediante la aplicación de procedimientos de desarrollo que optimizan el uso de los recursos de la GPU mediante CUDA.
Autor: Moisés Morales Morales
Tutor: Manuel Jesús Domínguez Morales y Angel Fco. Jimenez Fernandez
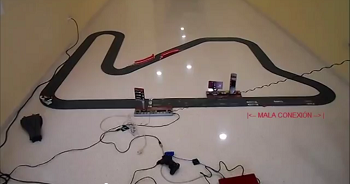
Se han estudiado los protocolos de comunicación de un sistema de slot digital. En concreto el sistema elegido es el Scalextric Digital System de Tecnitoys.
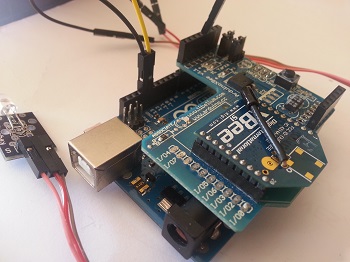
Tutor: Manuel Jesús Domínguez Morales
Proyecto libre y de código abierto que hace uso de Arduino como plataforma hardware y Android como plataforma software. Está enfocado a acercar de forma fácil y didáctica la configuración y manejo de un microcontrolador sencillo, además de la implementación de una aplicación Android desde cero. La parte hardware se desarrolla mediante un aprendizaje basado en proyectos, que confluyen en el diseño final.

Tutor: José Luis Guisado Lizar (Departamento: Arquitectura y Tecnología de Computadores)
Co-tutor: Antonio Córdoba Zurita (Departamento: Física de la Materia Condensada)
Se realizaron pruebas de ejecución sobre un cluster con un total de 40 núcleos, demostrando que se obtiene una buena aceleración, midiendo la escalabilidad y probando que el algoritmo paralelo converge hacia soluciones satisfactorias en un número de generaciones muy inferior al algoritmo secuencial.


![]()

Departamento de Arquitectura y Tecnología de Computadores
Escuela Técnica Superior de Ingeniería Informática, Avda. Reina Mercedes s/n, despacho F0.87. C.P.: 41012, Sevilla
Teléfono: (+34) 954 55 64 49 e-mail: secatc 'arroba' us.es