Autor: Darío Veledo García
Director:FERNANDO DÍAZ DEL RÍO
En este PFC el alumno desarrolló una aplicación denominada JRoboCell para el control y monitorización de una célula de robots industriales SCORBOT. JRoboCell monitoriza constantemente mediante paso de mensajes el estado actual de todos los robots de la célula, pudiendo observar su posición y estado: subrutina que cada robot está ejecutando, coordenadas XYZ del elemento terminal, estado de la pinza, valor de las entradas y salidas tanto las analógicas como las digitales, etc.
De esta forma, el interés técnico e industrial de JRoboCell es servir como plataforma de desarrollo de un sistema CIM (Computer Integrated Manufacturing) de código abierto y modificable para células basadas en robots SCORBOT.
JRobocell se puede usar para que los estudiantes asimilen los conceptos básicos de la programación en robótica, así como conocer el funcionamiento de una célula robótica y sus posibles aplicaciones industriales. De hecho, JRobocell se ha usado en el laboratorio de Automatización de la Escuela Politécnica Superior con los 3 robots SCORBOT ER IV y sus elementos asociados (cinta trasportadora, mesa giratoria, …).
DETECCIÓN DE FORMA Y COLOR
Aplicamos una serie de filtros de media y mediana a una imagen. Realizamos una cuantización de la imagen, una binarización .
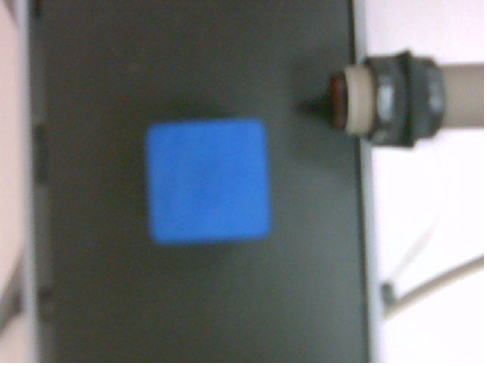
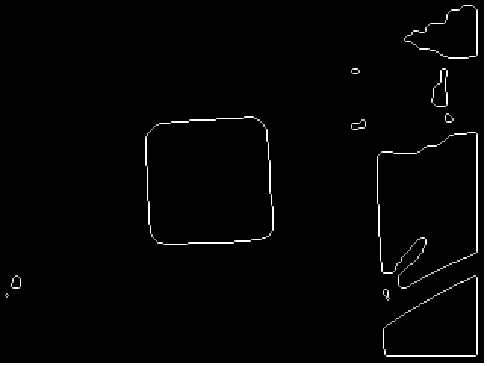
Por último, buscamos el esqueleto de la imagen
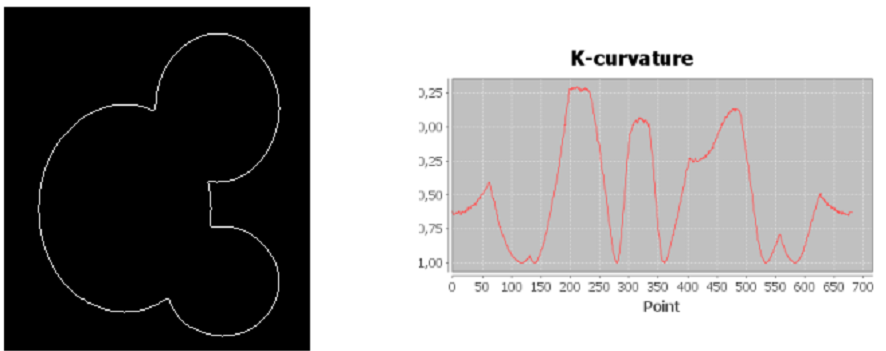
DETECCIÓN DE FORMA : método KRA
El método propuesto se basa en tres etapas. En la etapa inicial habiendo obtenido anteriormente los bordes de las figuras a analizar calcula las KCurvaturas de ambas imágenes lo que nos permitirá comparar objetos independientemente de si están rotadas o escaladas. Una vez calculadas las KCurvaturas, adaptamos la KCurvatura más larga al tamaño de la más corta, a este proceso se le denomina ReSampling. Por último, la autocorrelación permite comparar si las KCurvaturas obtenidas representan imágenes similares
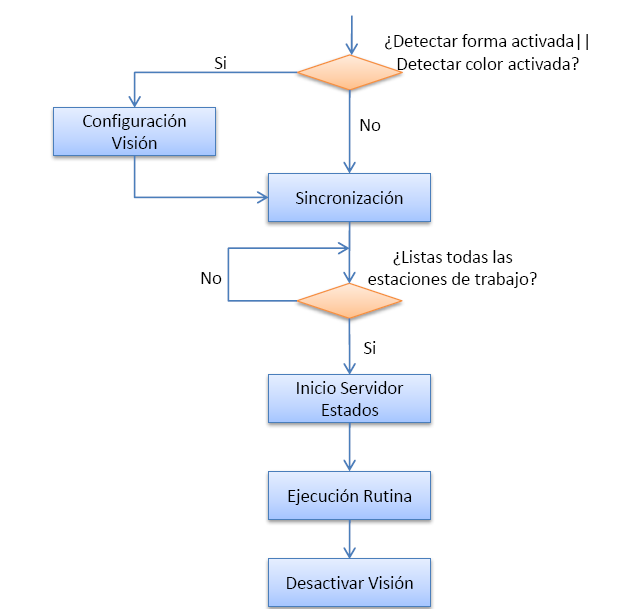
Inicio de una rutina