Autor: Alejandro Núñez Cabello
Directores: Daniel Cagigas Muñiz y Pablo Iñigo Blasco
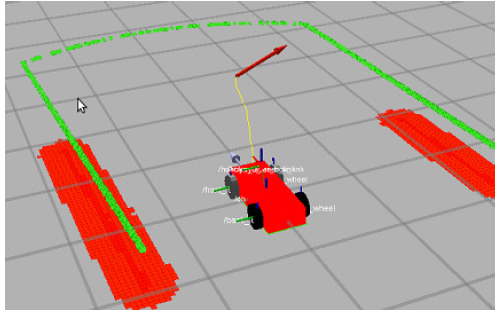
Tomando como base la joven y potente plataforma ROS (Robot Operating System), el trabajo de varios grupos de investigación se pretende integrar un sistema SLAM (Simultaneous Learning and Mapping) en un robot tipo Erratic,. Para ello el robot ha de navegar por un entorno de oficinas y realizar un mapa del entorno.