
TFG destacados
SISTEMA IoT PARA EL RIEGO ÓPTIMO DEL OLIVAR BASADO EN SERVICIOS ABIERTOS DE PREDICCIÓN METEOROLÓGICA

Autor: Adrián Fenet López
Tutor: Daniel Cagigas Muñiz
Resumen: Debido a la escasez de precipitaciones y la importancia de la gestión del agua en el valle del Guadalquivir, se ha realizado un sistema IoT para optimizar el riego del olivar. El sistema consiste en una serie de nodos que en primer lugar miden la humedad relativa del suelo. Esta información es enviada a una plataforma en la nube (Amazon Web Services). Junto con la información enviada por un servicio de predicción meteorológica gratuito (OpenWeather) y las necesidades específicas del cultivo se toman decisiones de riego de manera inteligente y de forma automática.
Autor: Federico Centeno Gutiérrez
Tutores: Alejandro Linares Barranco y Juan Manuel Montes Sánchez
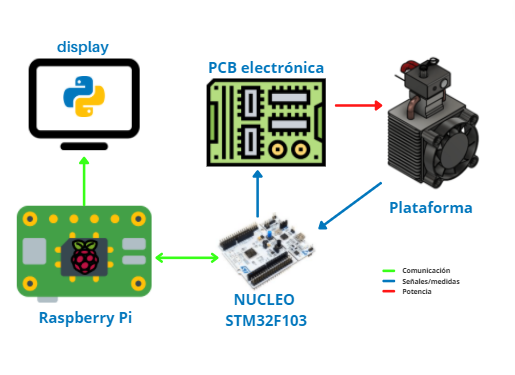
Resumen: La Reacción en Cadena de la Polimerasa (PCR) es una técnica que sirve para replicar fragmentos genéticos. Este método alterna ciclos de calentamiento para separar las cadenas de ADN con otros de enfriamiento para copiarlas mediante el uso de la molécula polimerasa. Es utilizada para la identificación de un fragmento concreto de ADN en una muestra, el ADN en un crimen o para pruebas de paternidad. En el presente proyecto se ha diseñado y fabricado un prototipo mínimo viable de termociclador de bajo coste, capaz de llevar a cabo el proceso de termociclado necesario para la replicación genética mediante el método PCR para detección de virus tales como el SARS-CoV-2.
Autor: Pablo Sánchez Cuevas
Tutor: Fernando Díaz del Rio
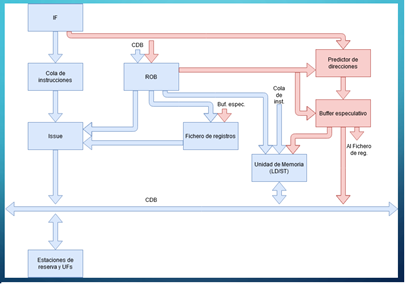
Resumen: En este trabajo se explora el estado del arte de la Predicción de Valores (Value Prediction) en la microarquitectura de una CPU superescalar con especulación dinámica y, con un mayor foco, la Predicción de Direcciones de memoria (Address Prediction).
Autor: Juan José Requena Lama
Tutor: Fernando Díaz del Río
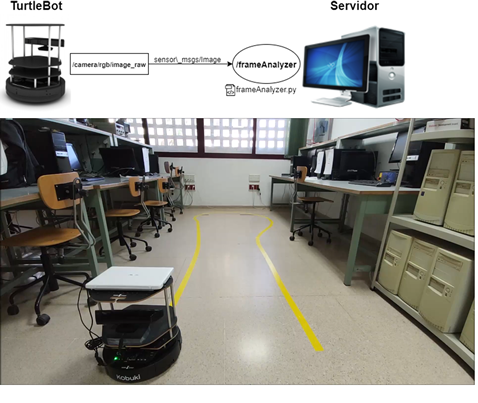
Resumen: ROS, siglas de Robot Operating System, se trata de un framework para el desarrollo de software para robots. Debido a su creciente popularidad, se está empezando a utilizar junto con el uso de computación en la nube para la obtención de off-loading computacional en robots.
Autor: Javier Civit Masot
Tutores: Fernando de la Portilla de Juan y José Luis Sevillano Ramo
Resumen: La anastomosis intestinal lado a lado es un procedimiento quirúrgico en el que se realiza una incisión entre dos segmentos paralelos del intestino y luego se suturan juntos. El propósito de este trabajo es investigar si el diámetro usado en la práctica quirúrgica estándar de la anastomosis conduce a flujos circulatorios cerrados indeseables que pueden ser dañinos para el tejido intestinal
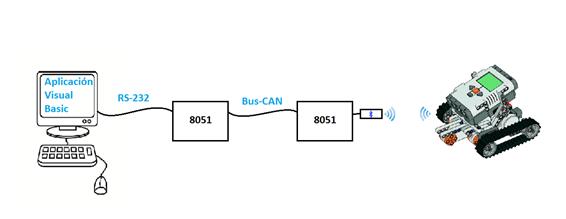
Autor: Manuel Alejandro Fernández Caballero
Tutores: Alejandro Linares Barranco
Este proyecto trata de elaborar una interfaz de control CAN-Bluetooth para robots Lego NXT en el contexto de la titulación de Grado en Ingeniería Electrónica Industrial para desarrollar con más profundidad las competencias de las asignaturas de Informática y Comunicaciones Industriales, y de Robótica Industrial.
Autor: Miguel Ángel Cifredo Campos
Tutores: Fernando Díaz del Rio
Resumen: Combinando la experiencia del profesorado con la redacción del material por parte de los alumnos de una asignatura, se genera el material de la misma, que será más cercano se ha generado el material de una asignatura. Además se ha evaluado la calidad del mismo y las mejoras solicitadas por los propios alumnos, gracias a un portal específico para tal objetivo. Se ha ejemplarizarlo para una asignatura de un Grado de Ingeniería Informática. Lo que permitirá, introducir mejoras y correcciones técnicas en los mismos durante el curso siguiente a su redacción inicial.

Autor: Francisco Javier Borrego Cejudo (Grado en Ingeniería de Computadores)
Tutores: Manuel Jesús Domínguez Morales y Juan Pedro Domínguez Morales
Resumen: Trata del desarrollo de un dispositivo capaz de detectar la posición de la mano del usuario y transmitirlo a otro dispositivo de manera inalámbrica, que recreará el movimiento de la mano en un brazo biónico artificial a través de un microcontrolador endosado a un guante en el usuario y otro endosado a la mano artificial.
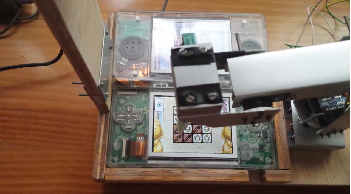
Autor: Manuel Caballero Sánchez (Ingeniería Informática)
Tutores: Manuel Jesús Domínguez Morales y Ángel Jiménez Fernández.
Resumen: Robostylus es un robot capaz de manipular de manera autónoma la pantalla táctil de una consola Nintendo DS. Está fabricado a base de aluminio y madera, se mueve mediante servos, y es capaz de detectar el contacto con la pantalla mediante un sensor de presión Se conecta a un ordenador mediante un circuito de control, y se ha creado el software necesario para asistir con sus movimientos. El software se encarga de realizar todos los cálculos necesarios para que el brazo robótico toque la pantalla en la posición correcta.
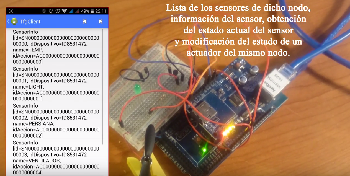
Autor: Joaquín Jesús Pineda Gutiérrez (Grado en Tecnologías Informáticas)
Tutorres: Manuel Jesús Domínguez Morales y Francisco de Asís Gómez Rodríguez.
Resumen: El proyecto se basa en el uso de unos nodos remotos distribuidos por todo el hogar que hacen uso de tecnologías ya existentes (microcontroladores existentes en el mercado, protocolos estándares, etc.) encargados de medir uno o varios aspectos de la ubicación en la que se encuentran. Gracias a ello podemos tener un control total sobre las condiciones del hogar.


![]()

Departamento de Arquitectura y Tecnología de Computadores
Escuela Técnica Superior de Ingeniería Informática, Avda. Reina Mercedes s/n, despacho F0.87. C.P.: 41012, Sevilla
Teléfono: (+34) 954 55 64 49 e-mail: secatc 'arroba' us.es