
Autor: Juan José Requena Lama
Tutor: Fernando Díaz del Río
Resumen: ROS, siglas de Robot Operating System, se trata de un framework para el desarrollo de software para robots. Debido a su creciente popularidad, se está empezando a utilizar junto con el uso de computación en la nube para la obtención de off-loading computacional en robots.
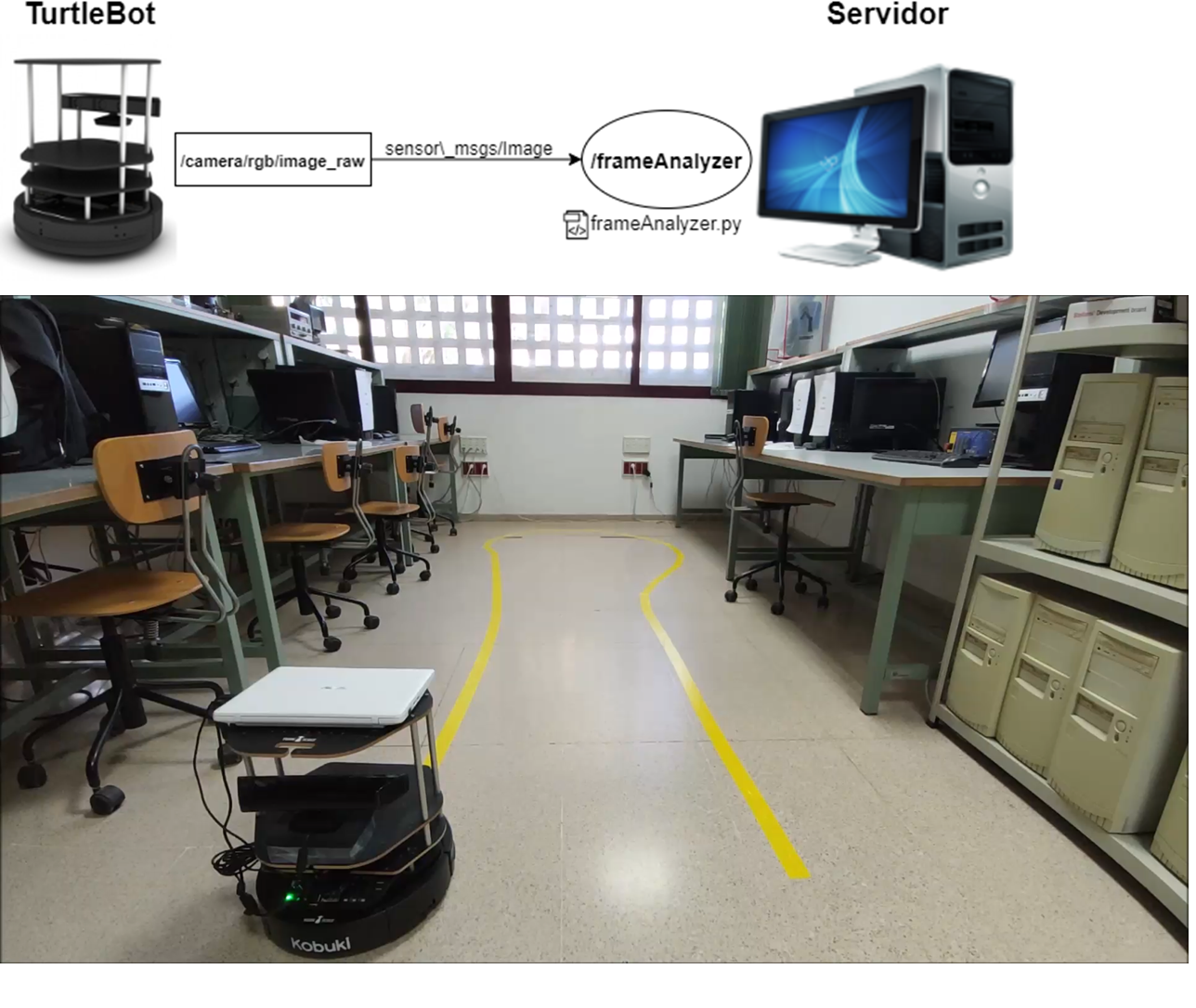
Sin embargo, dentro de una red local inalámbrica, las necesarias conexiones TCP que el sistema exige para la comunicación entre los llamados nodos de ROS, presentan diferentes inconvenientes en cuanto a límite de ancho de banda, retardos y jitter. En el presente trabajo, se analizan las dificultades encontradas en un robot TurtleBot que transmite las imágenes tomadas por su cámara a un servidor local. Se proponen también posibles soluciones, como la compresión de la imagen previamente a su transferencia o la reducción de la frecuencia de su publicación para conseguir una mejora en el rendimiento de dicha comunicación.
Calificación: Matrícula de Honor


