
Autor: Manuel Alejandro Fernández Caballero
Tutores: Alejandro Linares Barranco
Este proyecto trata de elaborar una interfaz de control CAN-Bluetooth para robots Lego NXT en el contexto de la titulación de Grado en Ingeniería Electrónica Industrial para desarrollar con más profundidad las competencias de las asignaturas de Informática y Comunicaciones Industriales, y de Robótica Industrial.
Para este proyecto el primer paso es crear una aplicación de control en Visual Basic para PC, la cual envía la información a la UART de un microcontrolador 8051, debidamente programado para enviar la información recibida por la UART al bus industrial CAN. Una segunda tarjeta conectada al bus CAN y basada igualmente en el microcontrolador 8051, transmite la información a un robot móvil NXT de Lego mediante un puente UART-Bluetooth conectado al microcontrolador. La comunicación es bidireccional, por lo que ambos microcontroladores están programados para enviar información de la UART al CAN y viceversa; a la vez de realizar la comunicación entre ambos microcontroladores a través de Bus-CAN.
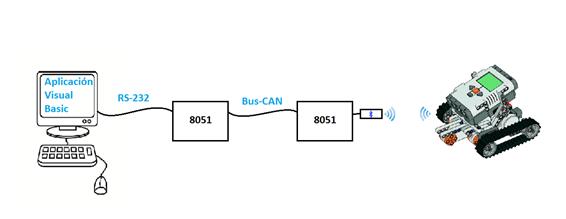
Fig 1. Esquema de comunicación industrial ente PC y Lego Mindstorms NXT
Calificación: Matricula de Honor 10


